Have you ever wondered how a camera takes a 3D object and captures it as a 2D image? It’s all thanks to the power of the linear camera model and camera calibration. In this article, we’ll dive into the details of this fascinating technology and explore how it works.
Contents
The Forward Imaging Model
The forward imaging model is the foundation of the linear camera model. It is the process that takes a point in the 3D world and projects it onto the 2D image plane of a camera. To understand this model, let’s break it down step by step.
Coordinate Frames
First, we have the world coordinate frame (w) and the camera coordinate frame (c). The camera coordinate frame is defined by its own set of axes, with the Z-axis aligned with the camera’s optical axis.
Perspective Projection
To project a 3D point in the world coordinate frame onto the image plane, we use perspective projection. This involves dividing the x and y coordinates of the point by its distance from the camera’s focal point (F). This results in the x and y coordinates of the point’s projection (xi) on the image plane.
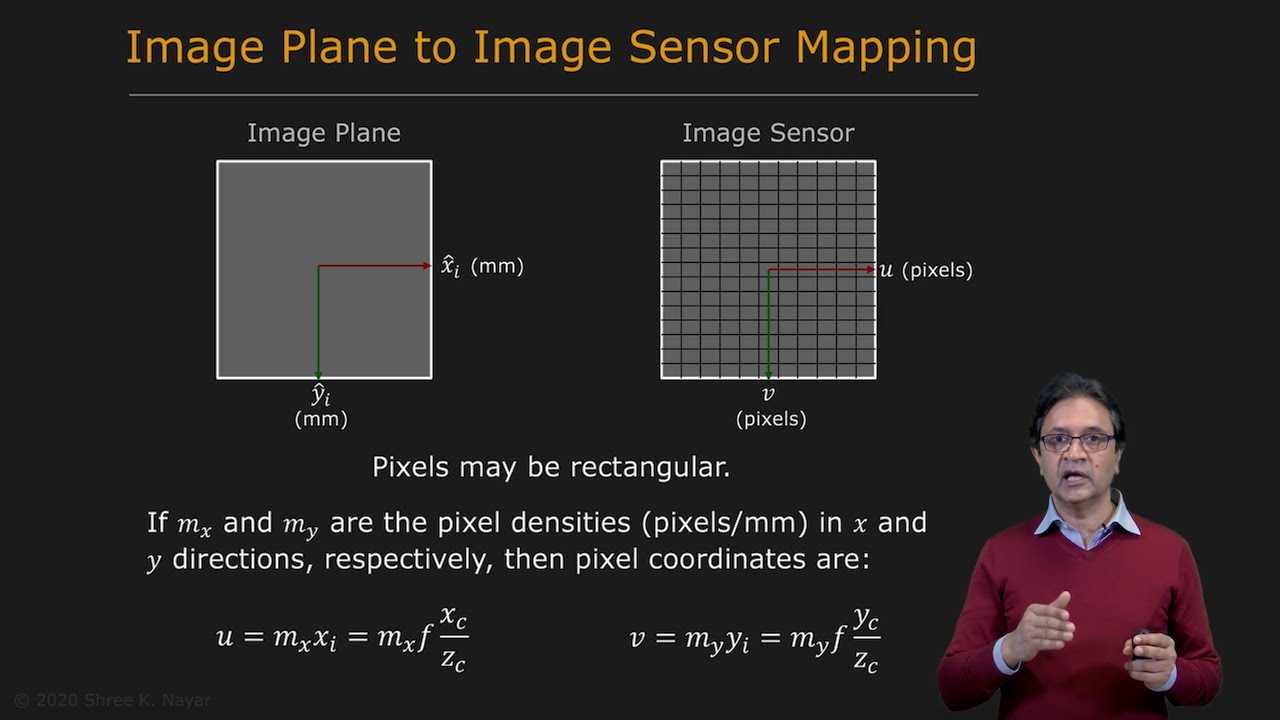
From Millimeters to Pixels
In reality, the image plane is made up of pixels, not millimeters. To convert the coordinates from millimeters to pixels, we introduce pixel densities (mx and my) in the x and y directions, respectively. By multiplying the x and y coordinates by their corresponding pixel densities, we can obtain the pixel coordinates (u and v) of the projected point.
The Principal Point
Up until now, we have assumed that the center of the image corresponds to the point where the camera’s optical axis intersects the image plane. However, in practice, the principal point (ox, oy) can be located anywhere on the image plane. Thus, we modify the perspective projection equations to take this into account.
The Intrinsic Matrix
By combining perspective projection and the conversion from millimeters to pixels, we arrive at a linear model for the camera. This model can be represented by a matrix known as the intrinsic matrix (M). The intrinsic matrix includes the camera’s internal parameters, such as the focal lengths (fx and fy) and the principal point (ox and oy).
Mapping from World to Camera
To map a point from the world coordinate frame to the camera coordinate frame, we need to consider the camera’s position and orientation. The position is defined by the vector (SW), and the orientation is described by the rotation matrix (R). By multiplying the rotation matrix by the coordinates of the point in the world frame and adding the translation vector (T), we obtain the coordinates of the point in the camera frame.
The Extrinsic Matrix
To simplify the mapping from world to camera coordinates, we introduce homogeneous coordinates. By using homogeneous coordinates, we can represent the transformation from world to camera coordinates as a single matrix known as the extrinsic matrix (XT). The extrinsic matrix includes both the rotation matrix and the translation vector.
The Projection Matrix
Finally, by combining the intrinsic and extrinsic matrices, we obtain the projection matrix (P). The projection matrix encapsulates the entire transformation from a point in the world coordinate frame to its pixel coordinates on the image plane. It is a 3×4 matrix that contains all the information needed to calibrate the camera.
With the projection matrix, we can map any point in the 3D world to its corresponding location on the 2D image. This opens up a world of possibilities for applications such as computer vision, augmented reality, and 3D reconstruction.
FAQs
Q: What is the linear camera model?
A: The linear camera model is a mathematical model that describes how a camera projects a 3D object onto a 2D image plane. It is based on perspective projection and involves converting coordinates from millimeters to pixels.
Q: What is camera calibration?
A: Camera calibration is the process of determining the internal parameters of a camera, such as its focal length and principal point. This information is crucial for accurate mapping between the 3D world and the 2D image.
Q: Why is the linear camera model important?
A: The linear camera model allows us to understand and manipulate the way a camera captures images. By calibrating a camera and knowing its internal parameters, we can accurately map 3D objects onto 2D images.
Conclusion
The linear camera model and camera calibration are essential elements in the world of computer vision and imaging technology. By understanding how cameras project 3D objects onto 2D images and calibrating their internal parameters, we can unlock a wide range of applications. Whether it’s capturing stunning photographs or developing advanced computer vision algorithms, the linear camera model lays the foundation for it all.
To learn more about the fascinating world of technology, visit Techal.
