Welcome back! In our previous lectures, we delved into the Eigen System Realization Algorithm, a powerful data-driven tool for building low-dimensional models based on impulse response data. However, obtaining accurate impulse response data can be challenging in real-world scenarios. Noisy measurements, nonlinear dynamics, and other factors can all contribute to unreliable results. But fear not, as there is a solution: Observer Kalman Filter Identification, also known as OK-ID.
Understanding Observer Kalman Filter Identification (OK-ID)
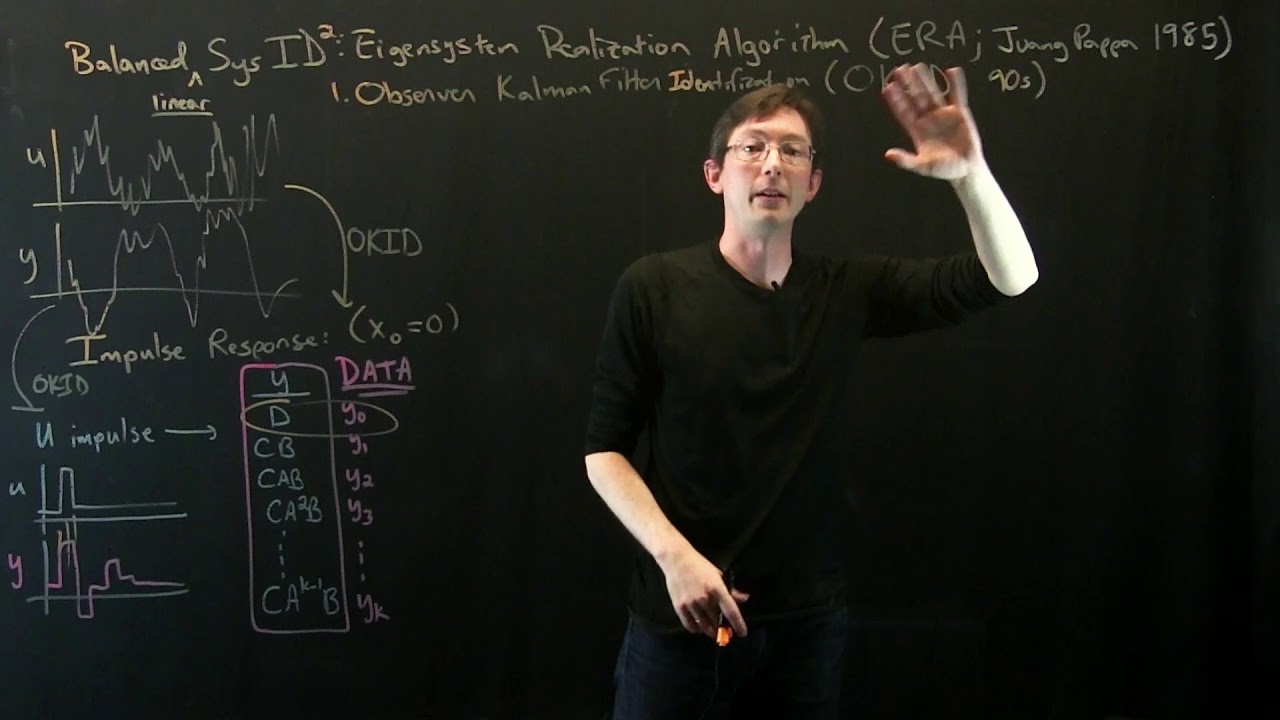
OK-ID is an add-on to the Eigen System Realization Algorithm that tackles the challenges posed by noisy and complex data. Developed in the 90s by experts at Princeton and Langley, OK-ID utilizes a common filter to estimate the optimal impulse response consistent with the given input-output data.
To understand how OK-ID works, let’s imagine a scenario where we have a system with changing inputs at each time step. The goal is to determine the system’s response over time for different inputs. However, as the inputs change continuously, the output becomes a convolution of all these inputs, making it complex to analyze.
OK-ID addresses this complexity by estimating the optimal impulse response using pseudo-random input-output data. By taking advantage of a common filter estimator, OK-ID determines the impulse response that is most consistent with the input-output data. These estimated measurements can then be used alongside the Eigen System Realization Algorithm to build a reduced-order model.
The Power of OK-ID
OK-ID is a powerful tool when dealing with noisy and challenging data. It allows engineers to overcome the limitations of obtaining reliable impulse response data. By employing OK-ID, it becomes possible to estimate the impulse response even in scenarios where traditional methods fail.
The combination of OK-ID and the Eigen System Realization Algorithm empowers engineers to tackle complex and challenging problems. From noisy data to hard-to-measure and lightly damped dynamics, OK-ID provides a robust solution.
FAQs
Q: How does OK-ID work in the presence of noisy data?
A: OK-ID handles noisy data by estimating an optimal impulse response consistent with the given input-output data. By leveraging a common filter and a pseudo-random input, OK-ID effectively denoises the data and determines the best impulse response.
Q: Can OK-ID be used for nonlinear systems?
A: While OK-ID is primarily designed for linear systems, it can still be useful in some nonlinear scenarios. However, for more advanced nonlinear system identification methods, we recommend exploring options like DMD (Dynamic Mode Decomposition) or Koopman theory.
Q: Can I try OK-ID on my own systems?
A: Absolutely! In our next lecture, we will provide you with the code to implement OK-ID. You can experiment with it and apply it to your own systems to see its effectiveness firsthand.
Conclusion
Observer Kalman Filter Identification (OK-ID) is a game-changer in the field of data-driven control. By enabling engineers to estimate impulse responses in the presence of noisy and complex data, OK-ID expands the capabilities of the Eigen System Realization Algorithm. Whether dealing with challenging measurements or complex dynamics, OK-ID provides a robust solution for system identification.
If you’re ready to dive into the coding aspect of OK-ID, join us in the next lecture, where we’ll provide the necessary code and guide you through various implementations. Stay tuned for an exciting journey into the world of OK-ID and its applications in real-world scenarios.
To learn more about Techal, visit Techal.
