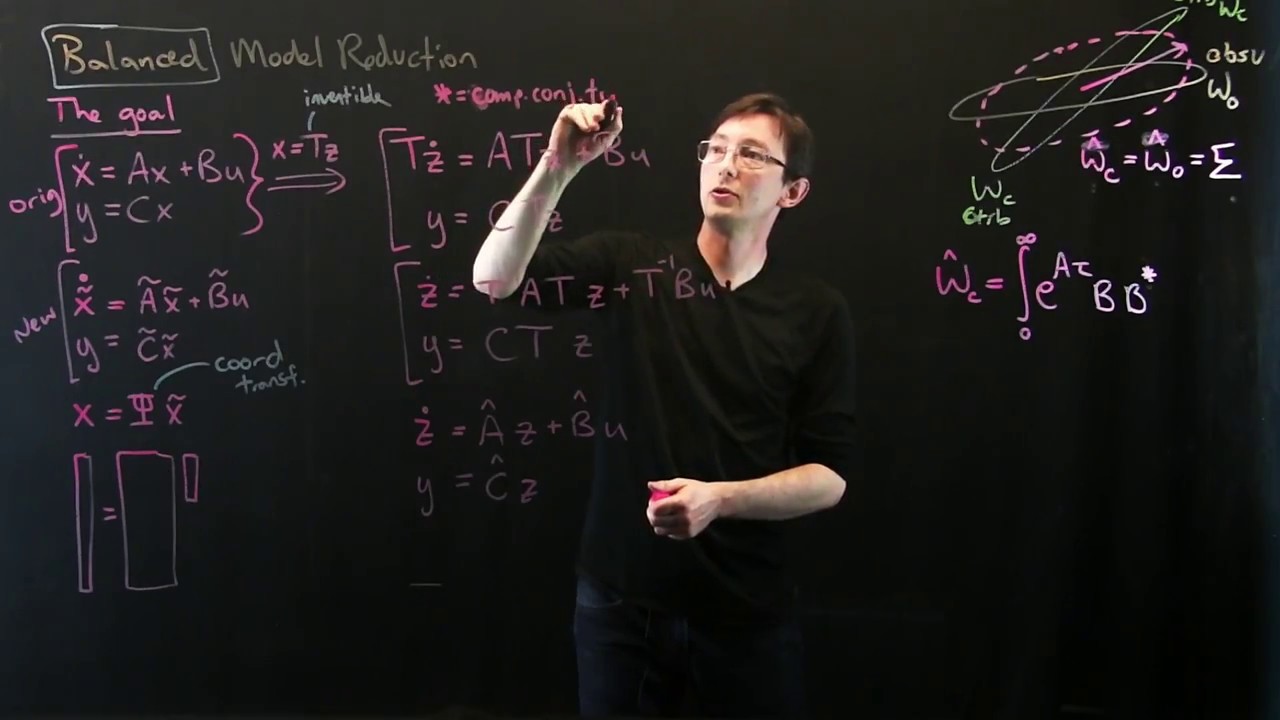
Welcome back! In our last video, we discussed the high-level goal of balanced model reduction: finding a coordinate transformation from a high-dimensional state X to a low-dimensional state X tilde that captures the most important input-output dynamics from you to Y. Before we delve into finding this balancing transformation, we need to understand how linear state-space models change under a change of coordinates.
Contents
Impact of Coordinate Transformation on Dynamics
To better grasp the concept, let’s look at what happens when we change the coordinates from X to Z, represented by the equation X = T * Z. Here, T is an invertible matrix that transforms the X coordinates to Z coordinates, or vice versa.
When we perform this coordinate transformation, the dynamics change as well. The new dynamics are now represented by the equation Z dot = T inverse A T Z + T inverse B * U, where A, B, and U are the matrices representing the system dynamics and input.
To simplify the notation, we can refer to A, B, and C in the Z-coordinate system as A hat, B hat, and C hat. These new matrices, A hat, B hat, and C hat, allow us to rewrite the dynamics as Z dot = A hat Z + B hat U and Y = C hat * Z.
Controllability and Observability Gramians in the New Coordinate System
Now, let’s shift our focus to the important concept of controllability and observability Gramians. We want to understand how these Gramians change under the coordinate transformation.
For the controllability Gramian, denoted as WC hat, we can express it as the integral from 0 to infinity of e to the A tau B B star e to the A star tau d tau. Similarly, the observability Gramian, denoted as WO hat, equals the integral from 0 to infinity of e to the A star tau C star C e to the A tau d tau.
By expanding the coordinate transformation matrices, we can simplify the expressions for WC hat and WO hat. After simplification, we find that WC hat equals T inverse WC T, and WO hat equals T star WO T.
Designing the Balancing Transformation
The goal is to find a special coordinate transformation matrix, T, that makes the controllability and observability Gramians equal and diagonal. This allows us to prioritize the most controllable and observable directions in our reduced state-space representation.
In the new coordinate system, the most controllable and observable directions are represented by the diagonal matrix Sigma, ordered from the most controllable and observable to the least. Truncating the dimensions becomes a straightforward task, as we can select the first N columns of T that correspond to the N most jointly controllable and observable states.
This subset of columns of T is what we call the balancing transformation, denoted as T_balanced. It effectively captures the hierarchy of the state space, providing an easy way to choose the desired representation dimensionality.
Conclusion
Understanding how linear state-space models change under a change of coordinates is crucial for data-driven control. By leveraging the concepts of controllability and observability Gramians, we can design a balancing transformation that optimizes the representation of system dynamics in a reduced state-space.
In the next video, we will delve deeper into the design of the balancing transformation matrix, T, and explore how it can be specifically tailored to achieve desirable properties.
For more information and in-depth tutorials, visit Techal.
FAQs
Q: What is the purpose of a balancing transformation in control systems?
A: The balancing transformation aims to find a coordinate transformation that captures the most important input-output dynamics from a high-dimensional state to a lower-dimensional state. This allows for better control over the system by focusing on the most controllable and observable directions.
Q: How are the controllability and observability Gramians affected by a change of coordinates?
A: When we perform a coordinate transformation, the controllability and observability Gramians transform as WC hat = T inverse WC T and WO hat = T star WO T, respectively. These transformed Gramians help us identify the most jointly controllable and observable states in the new coordinate system.
Q: How do we determine the dimensions to truncate in the reduced state-space representation?
A: The dimensions to truncate can be determined by selecting the first N columns of the balancing transformation matrix, T_balanced. These columns correspond to the N most jointly controllable and observable states, providing an easy way to choose the desired representation dimensionality.
Conclusion
Understanding the impact of coordinate transformations on control system dynamics and the manipulation of controllability and observability Gramians is crucial for effective data-driven control. By designing a balancing transformation, we can optimize the representation of system dynamics in a reduced state-space, enabling more efficient control over complex systems.
