Are you curious about how to recover the three-dimensional structure of a scene using just two images? In this article, we’ll explore a method known as simple stereo or horizontal stereo, which allows us to do just that. But before we dive into the details, let’s first understand the importance of camera calibration.
Contents
Understanding Camera Calibration
Calibrating a camera provides us with valuable information about its internal parameters, such as focal length and optical center. With this information, we can determine the 2D projection of a 3D point in an image. However, we still need more information to reconstruct the 3D scene accurately.
The Concept of Simple Stereo
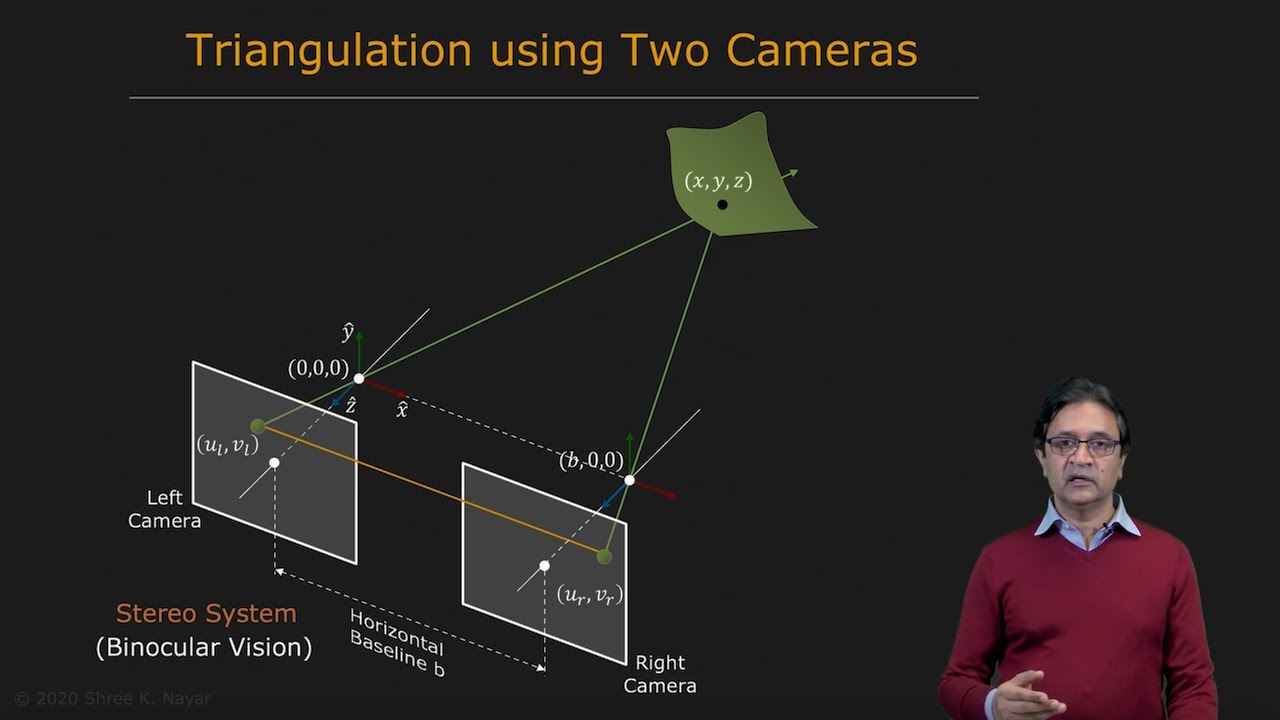
To obtain additional information, we can use two images captured from different positions. This can be achieved by using two cameras or by taking two different images using a single camera. In a simple stereo system, we have a left camera and a right camera, which are identical except for a horizontal displacement called the baseline.
Triangulation: Finding Corresponding Scene Points
If we locate a point in the left image, we can find its corresponding point in the right image. By considering the two rays originating from these points, we can determine where they intersect in 3D space. This intersection point represents the physical point in the scene corresponding to the two image points.
The Reconstruction Process
Using the internal parameters of the cameras and the disparity between corresponding points, we can calculate the depth of a point in the scene. The disparity, which is the difference in the u-coordinate of the same scene point in the two images, is inversely proportional to the depth of the point. Therefore, closer points have larger disparities, while points at infinity have a disparity of zero.
Stereo Matching: Finding Correspondences
In order to perform stereo reconstruction, we need to find the correspondences between points in the left and right images. This process, known as stereo matching, involves comparing small windows in the left image with corresponding windows along the same scanline in the right image. The best match is determined based on similarity metrics such as the sum of absolute differences or normalized correlation.
Considerations in Stereo Matching
When performing stereo matching, it is important to consider several factors. Surfaces with texture are more suitable for matching, as they provide distinctive features to compare. Additionally, repetitive textures should be avoided, as they can lead to multiple matches that are not accurate. Finally, foreshortening, caused by the difference in projection areas between the left and right images, needs to be taken into account.
The Impact of Window Size
The choice of window size in stereo matching is crucial. Smaller windows provide better localization but are more sensitive to noise. On the other hand, larger windows offer more robust matches but result in more blurred disparity maps. To address this, an adaptive window method can be used, where multiple window sizes are employed and the best match is selected based on a normalized metric.
In conclusion, simple stereo or horizontal stereo systems provide a practical way to reconstruct the three-dimensional structure of a scene using only two images. By calibrating the cameras and finding correspondences between points, we can estimate the depth of each point in the scene. While stereo matching has its challenges, advancements in this field have led to more accurate and detailed disparity maps.
For more information about technology and its applications, visit Techal.
FAQs
Q: Can simple stereo systems work with just one camera?
A: Yes, simple stereo systems can be achieved with a single camera by capturing two images at different times or from slightly different positions.
Q: Are there other methods for finding correspondences besides template matching?
A: Yes, there are various methods for finding correspondences, including feature-based methods, graph-cut techniques, and machine learning-based approaches.
Q: How can stereo reconstruction be used in practical applications?
A: Stereo reconstruction has a wide range of applications, including robotics, navigation systems, depth sensing, augmented reality, and 3D modeling.
Q: What are the main limitations of simple stereo systems?
A: Simple stereo systems may struggle with textureless and repetitive surfaces, as well as scenes with significant occlusions or large depth variations.
Conclusion
Simple stereo or horizontal stereo systems provide a powerful tool for reconstructing the three-dimensional structure of a scene using just two images. By calibrating the cameras, finding correspondences, and performing stereo matching, we can estimate the depth of each point in the scene. While challenges exist, ongoing advancements in stereo reconstruction techniques continue to improve the accuracy and reliability of this technology.
