Have you ever wondered how cameras are calibrated to capture stunningly accurate images? Well, the answer lies in the estimation and decomposition of the projection matrix. By understanding the intrinsic and extrinsic matrices, we can unlock a world of possibilities in camera calibration.

Contents
Breaking Down the Projection Matrix
The projection matrix, denoted as P, is estimated using a calibration method. However, we can delve deeper by decomposing it into two fundamental components: the intrinsic matrix (Mint) and the extrinsic matrix (Mext).
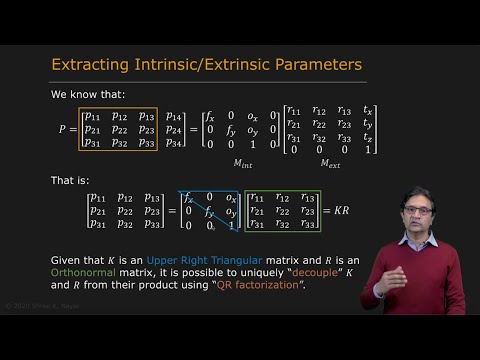
Let’s take a closer look at how this is accomplished. The projection matrix is the product of the intrinsic and extrinsic matrices: *P = Mint Mext**. The intrinsic matrix contains all the internal parameters, while the extrinsic matrix represents the external parameters of the camera.
To facilitate this decomposition, we focus on a 3×3 submatrix within P. This submatrix is the product of the calibration matrix (K) and the rotation matrix (R). The calibration matrix, which encapsulates the internal parameters, is an upper-right triangular matrix. Conversely, the rotation matrix is an ortho-normal matrix.
By employing a powerful technique called QR factorization, we can compute the calibration matrix (K) and the rotation matrix (R) from their product. This enables us to estimate both the internal parameters and the rotation matrix accurately.
Unraveling the Translation
While we have successfully found the rotation matrix and internal parameters, there is still one vital piece missing—the translation. However, the solution is rather straightforward. By examining the last column of P, we can find the calibration matrix (K) multiplied by the translation vector. Luckily, we already know K, which allows us to determine the translation vector as well. Specifically, the translation vector can be calculated as *K-1 (column of P)**.
With this, we have dissected the projection matrix and successfully separated the internal and external parameters of the camera. It’s fascinating how techniques in linear algebra can unravel the complexities hidden within the projection matrix.
Exploring Additional Considerations
Before we conclude, it’s essential to mention that there may be other intrinsic parameters to consider. For pinholes, we have accounted for all the relevant factors. However, when dealing with lenses, additional aberrations, such as radial and tangential distortion, may come into play. These non-linear effects can be addressed by either incorporating more parameters into the camera model or calibrating for these distortions beforehand, resulting in a linearized camera model. Both approaches contribute to a more refined camera calibration process.
That wraps up our exploration into the world of intrinsic and extrinsic matrices in camera calibration. By understanding these concepts and employing the techniques we’ve discussed, we can achieve remarkable precision in capturing images. Keep exploring and stay fascinated by the wonders of technology!
FAQs
-
What is camera calibration?
Camera calibration is the process of estimating the internal and external parameters of a camera to determine its properties and ensure accurate image capture. -
Why is decomposition of the projection matrix important?
Decomposing the projection matrix allows us to separate the internal (intrinsic) and external (extrinsic) parameters of the camera, enabling precise calibration and accurate image capture. -
What is QR factorization?
QR factorization is a powerful tool in linear algebra used to compute two matrices from their product. In the context of camera calibration, QR factorization helps calculate the calibration matrix (K) and the rotation matrix (R) from the product of an upper-right triangular matrix and an ortho-normal matrix.
Conclusion
Camera calibration is a fascinating process that involves dissecting the projection matrix into its intrinsic and extrinsic matrices. By leveraging the techniques of linear algebra, we can accurately estimate the internal parameters, rotation matrix, and translation vector of a camera. This knowledge empowers us to capture images with incredible precision and opens doors to endless possibilities in the field of photography. To dive deeper into the world of technology, visit Techal.