Are you interested in calibrating your uncalibrated stereo system? Look no further! In this article, we will guide you through the process of estimating the fundamental matrix, an essential step in calibrating your system. Let’s dive in!
Contents
Introduction
The fundamental matrix is a three by three matrix that allows us to calibrate uncalibrated stereo systems. By estimating this matrix, we can determine the relationship between corresponding features in two images taken from different viewpoints. Our goal is to find a small number of corresponding features and use them to estimate the fundamental matrix.
Estimating the Fundamental Matrix
To estimate the fundamental matrix, we need to find corresponding features in the two images. Despite the differences in viewpoint, these features will match when we apply techniques like Scale-Invariant Feature Transform (SIFT) to both images. Once we have identified the matches, we can plug their image coordinates into the epipolar constraint, which relates the image coordinates between the left and right images.

By stacking up linear equations for each scene point, we can rewrite the equations in matrix form. This form includes a matrix A, which contains the known image coordinates, and a vector F that represents the fundamental matrix. By solving this equation, we can find the least squares solution for F, taking into account the issue of scale.
Scale and Fundamental Matrix
The fundamental matrix operates on the homogeneous coordinates of scene points. As such, the fundamental matrix is only defined up to a scale factor. Scaling the fundamental matrix does not affect the image coordinates, as the relationship between the images remains the same.
To address the issue of scale, we set the scale of F by squaring it and fixing it to one. This constraint allows us to find the solution for F, which is equivalent to solving an eigenvalue problem. Rearranging the elements of F gives us the fundamental matrix.
Computing the Essential Matrix and Calibration
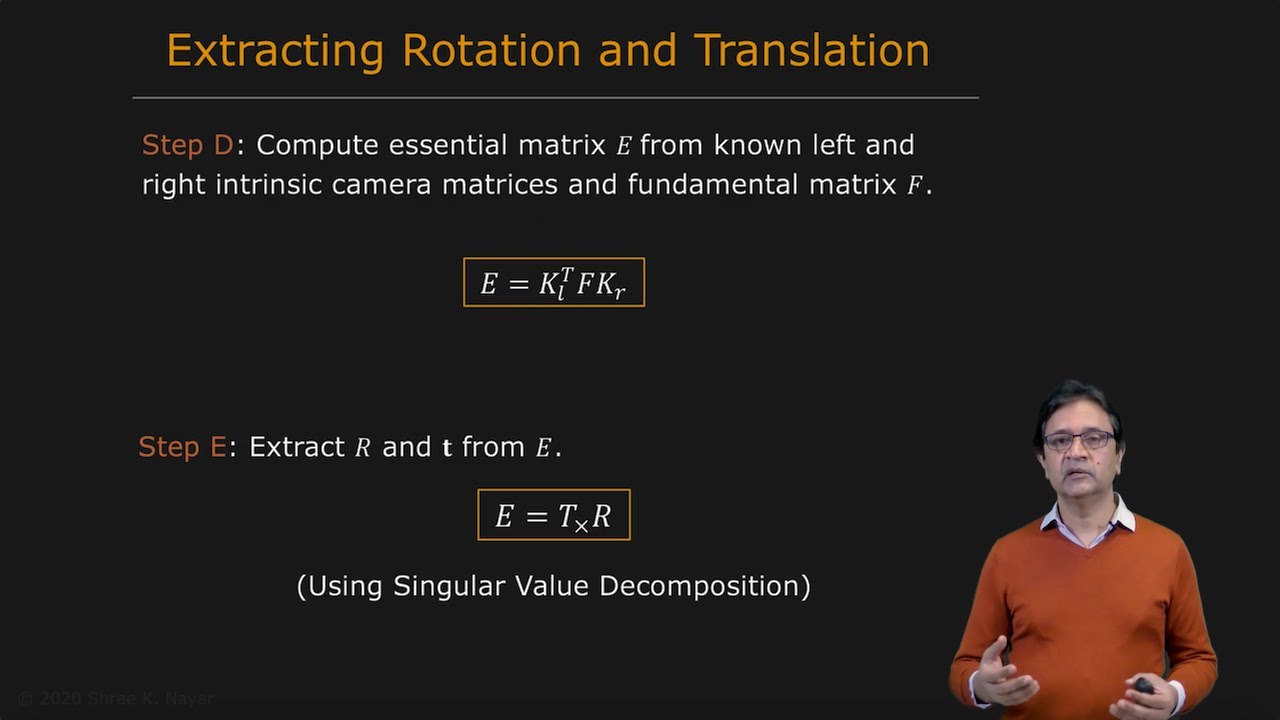
With the fundamental matrix in hand, we can compute the essential matrix by multiplying it with the camera matrices of the left and right cameras. The essential matrix relates the image coordinates to the scene points and allows us to calibrate the system.
From the essential matrix, we can further decompose it using singular value decomposition (SVD) to obtain the translation and rotation matrices. Once we have these matrices, our uncalibrated stereo system is fully calibrated.
FAQs
Q: Can I calibrate my uncalibrated stereo system without estimating the fundamental matrix?
A: No, the fundamental matrix is a crucial component in calibrating uncalibrated stereo systems. It establishes the relationship between the two images and enables accurate calibration.
Q: How many corresponding features do I need to estimate the fundamental matrix?
A: You only need a small number of corresponding features to estimate the fundamental matrix. These features should be matchable using techniques like SIFT.
Q: Can I use the fundamental matrix for other applications besides calibrating stereo systems?
A: While the fundamental matrix is primarily used in stereo system calibration, it also has applications in other computer vision tasks such as image rectification and 3D reconstruction.
Conclusion
Calibrating an uncalibrated stereo system may seem daunting, but by estimating the fundamental matrix, you can easily establish the relationship between the two images. With the fundamental matrix in hand, you can then compute the essential matrix and fully calibrate your system. So, why wait? Start calibrating your uncalibrated stereo system today and unlock its full potential!
For more information on technology and the latest advancements, visit Techal.
