Are you ready to dive deep into the world of data-driven control? In this article, we will explore a fascinating technique called balanced truncation that can revolutionize your understanding of controllability and observability in high-dimensional systems. So buckle up, because we’re about to embark on an exciting journey!
Contents
Unleashing the Power of Coordinate Transformation
Imagine having a coordinate transformation that can equalize and diagonalize the controllability and observability Gramians in your system. Sounds intriguing, right? Well, this is exactly what balanced truncation aims to achieve. By quantifying which directions are most controllable and observable in a high-dimensional system, balanced truncation unlocks valuable insights into the inner workings of your system.
The Birth of the Z Coordinates
Picture this: a coordinate system where joint controllability and observability reign supreme. That’s exactly what the Z coordinates represent. By applying a coordinate transformation, denoted as T, we can transform our original state space, X, into these new Z coordinates. And the best part? These Z coordinates provide a balanced perspective on controllability and observability, merging them into a harmonious dance of insights.
Enter the Reduced Order Model
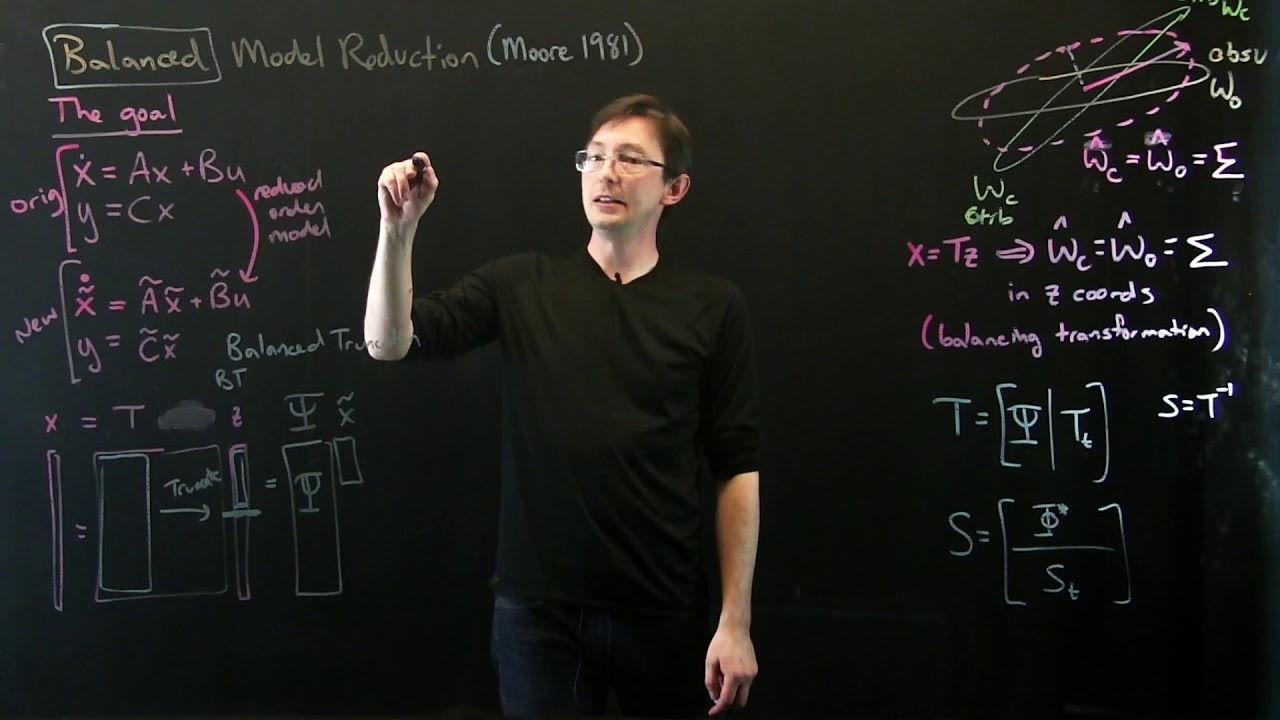
But wait, there’s more! In 1981, a brilliant mind named Moore took the Z coordinates and ran with them. He realized that these balanced coordinates held the key to creating a reduced order model. By selecting only the most controllable and observable directions in Z, Moore pioneered a principled approach to truncating the system. In simpler terms, he picked the topmost variables in Z and tossed away the rest.
The Journey from X to X tilde
Imagine starting with a towering X vector, brimming with millions of dimensions. By applying the coordinate transformation T, we can rewrite X as the product of T and Z. But here’s the interesting part: with balanced truncation, we can cherry-pick the first R columns of T and the first R entries of Z. We’ll give this reduced form a new name: X tilde. This compact representation captures the dominant patterns in the system, using only a few variables.
The Magic of Balanced Truncation
Now, let’s delve deeper into the mechanics of balanced truncation. Remember, we isolate the first R columns of T, which we’ll call Sigh. Simultaneously, we break down the rest of T into a truncation component, T truncate. And guess what? We also have S truncate, which corresponds to the first R rows of S, the inverse of T.
Unveiling the Dynamics
Here’s where things get really interesting. When we transform our coordinates to Z and retain only the first R components, we can analyze the dynamics. The equation DDT of Z simplifies to a combination of various matrices and our reduced state, X tilde. The result? We obtain a reduced order model that perfectly captures the essence of the original dynamics. Suddenly, we have a powerful tool for fast, low-latency control.
The Symphony of Input-Output Dynamics
But what about the input and output? Well, we’ve got that covered too! Remember B, the matrix associated with the input? We can determine its components using the coordinate transformation T. And for the output matrix C, it’s as simple as multiplying C by Sigh. With these pieces in place, we can now explore the captivating world of input-output dynamics.
The Journey Continues
Armed with this newfound knowledge, you might be wondering about its scalability to million or billion-dimensional systems. Here’s the reality: computing the Gramians for such colossal systems becomes impractical. But fear not! Next, we’ll embark on another adventure called balanced Proper Orthogonal Decomposition (POD). This data-driven approach, pioneered by Karen Wilcox and Clancy Raleigh, offers a practical way to approximate the transformations SCi and fee for larger systems. So stay tuned for the next chapter in our data-driven control saga.
In the meantime, keep exploring the fascinating world of control dynamics, and remember, Techal is your go-to source for all things technology! Head over to Techal to discover more exciting articles and stay ahead of the game. Your tech-savvy besties will thank you!
